
 صفحه اصلی
صفحه اصلی







01





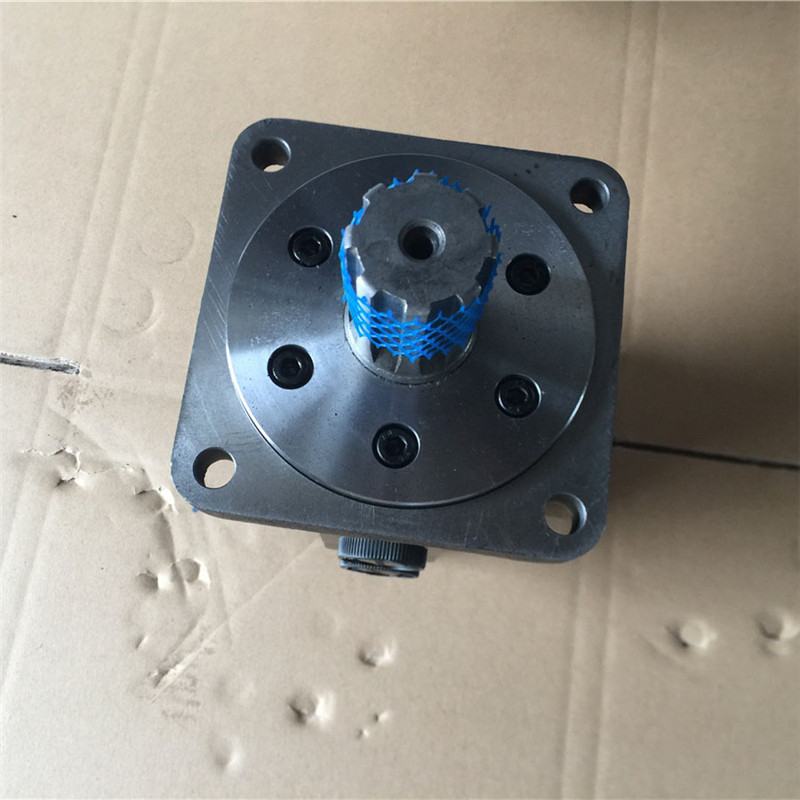
سوپاپ دانفوس اورجینال سری MCV116 Sauer

04
7 ژانویه 2019
PCP جریان dc را می پذیرد و یک خروجی فشار دیفرانسیل هیدرولیک متناسب تولید می کند. شماتیک عملیات داخلی را ببینید. جریان ورودی مرحله موتور گشتاور را کنترل می کند، یک شبکه پل متشکل از یک آرمیچر که بر روی یک محور پیچشی نصب شده و در شکاف هوای یک میدان مغناطیسی معلق است. دو آهنربای دائمی که به صورت موازی قطبی شده اند و یک صفحه اتصال، چارچوبی را برای پل مغناطیسی تشکیل می دهند.
در حالت تهی، آرمیچر در شکاف هوایی بین قطب های متضاد آهنرباها با هم ارزی نیروهای مغناطیسی آنها و فنرهای مرکزی با تنظیم تهی متمرکز می شود. با افزایش جریان ورودی، انتهای آرمیچر بسته به جهت جریان به سمت شمال یا جنوب بایاس می شود. حرکت آرمیچر حاصل توسط آمپر جریان کنترل، ثابت فنر و نیروهای بازخورد فشار دیفرانسیل (که به دنبال تعادل گشتاور، همانطور که در زیر توضیح داده شده است) تعیین می شود. خطی بودن رابطه ورودی/خروجی کمتر از 10% تا 80% جریان نامی است.

04
7 ژانویه 2019
خروجی پل مغناطیسی، گشتاور فلپر، به نوبه خود نسبت پل هیدرولیک را کنترل می کند. در حالت تهی، فلپر بین دو نازل در مرکز قرار می گیرد. در بالادست هر نازل روزنهای وجود دارد که وقتی سیستم در حالت صفر است، افت فشار اسمی را ایجاد میکند. بین نازل و دهانه در هر طرف یک پورت کنترل قرار دارد. همانطور که گشتاور فلپر را از یک نازل به سمت نازل دیگر جابجا می کند، یک فشار کنترل دیفرانسیل ایجاد می شود، سمت بالا نزدیکتر به فلپر است.
PCP یک شیر کنترل فشار حلقه بسته است که از واکنشهای فشار هیدرولیک داخلی برای تأثیرگذاری بازخورد ذاتی استفاده میکند. با یک ورودی پله ای از منبع جریان، فلپر ابتدا به سمت حرکت کامل حرکت می کند تا نازل سمت بالا (فرماندهی) را ببندد. فشار سیال از این طرف بالا می رود و فلپر را به سمت صفر حرکت می دهد. هنگامی که گشتاور خروجی از موتور برابر با گشتاور خروجی از بازخورد فشار باشد، سیستم در تعادل است. سپس فشار تفاضلی متناسب با جریان فرمان است.
