
 家
家













ラジアルピストンモーター MCR シリーズ 30、31、32、33、41
04
2019 年 1 月 7 日
MCR は、回転グループ内で放射状に配置されたピストンを備えた油圧モーターです。 これは、マルチストローク原理に従って動作し、トルクを出力軸に直接伝える低速、高トルクモーターです。 MCR モーターは、開回路と閉回路の両方で使用できます。
開回路では、作動油はリザーバから油圧ポンプに流れ、そこから油圧モータに輸送されます。 油圧モーターから作動油は直接リザーバーに戻ります。 油圧モーターの出力回転方向は、たとえば方向制御弁によって変更できます。
閉回路では、作動油は油圧ポンプから油圧モーターに流れ、そこから油圧ポンプに直接戻ります。 油圧モーターの出力回転方向は、たとえば油圧ポンプの流れの方向を反転することによって変更されます。 閉回路は通常、モバイル用途での静圧伝達に使用されます。
04
2019 年 1 月 7 日
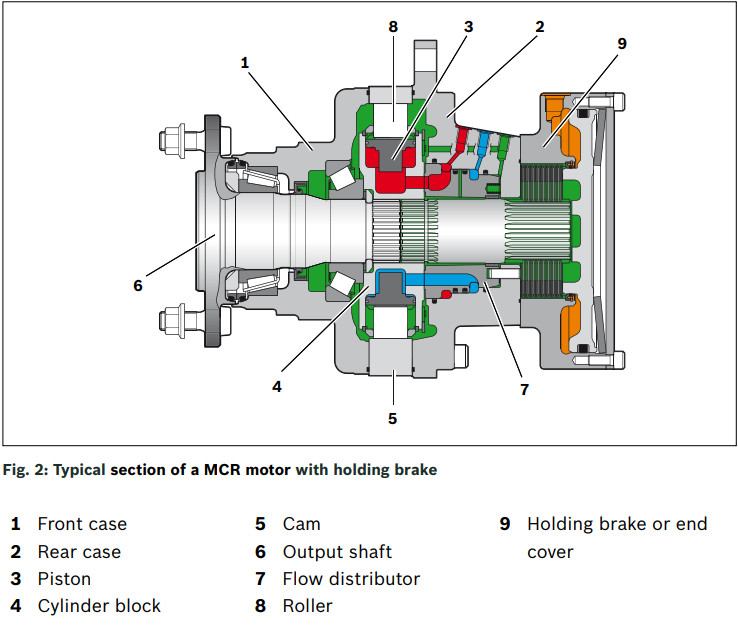
ラジアルピストンモーターは、2 つの部分からなるハウジング (1、2)、回転グループ (3、4)、カム (5)、出力シャフト (6)、およびフローディストリビューター (7) で構成されます。
静水圧エネルギーを機械エネルギーに変換します。
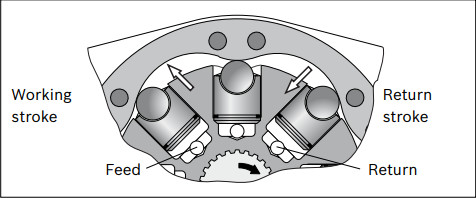
作動油はリアケース (2) のモーター入口ポートから分流器 (7) を経由し、ギャラリーを通ってシリンダーブロック (4) に導かれます。 シリンダーボア内の圧力が増加し、半径方向に配置されたピストン (3) を外側に押します。 この半径方向の力は、ローラー (8) を介してカムリング (5) のプロファイルに作用し、回転トルクを生み出します。 このトルクはシリンダブロック(4)内のスプラインを介して出力軸(6)に伝達される。
トルクが軸荷重を超えるとシリンダブロックが回転し、ピストンがストローク(作動ストローク)します。 ストロークの終端に達すると、ピストンはカムの反力によってボアに戻り(戻りストローク)、流体はリアケースのモーター出口ポートに送られます。
出力トルクは、圧力とピストン表面から生じる力によって生成されます。 高圧側と低圧側の圧力差が大きくなるにつれて増加します。
出力速度は変位に依存し、内向きの流れに比例します。 作動ストロークと戻りストロークの数は、カムのローブの数とピストンの数を掛けたものに相当します。

04
2019 年 1 月 7 日
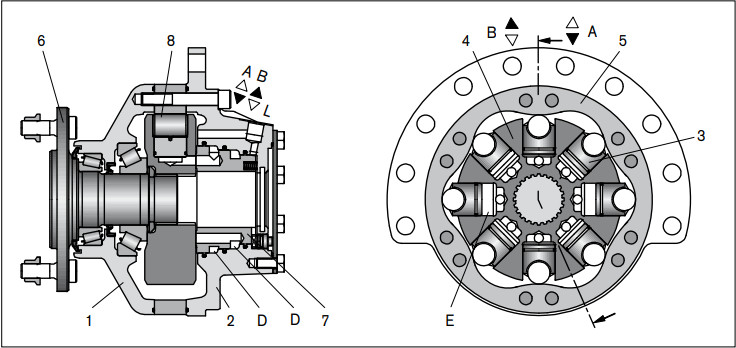
シリンダ室 (E) は、軸方向のボアと環状通路 (D) を介してポート A および B に接続されています。
Hydrobase モーター (フロント ケースのないハーフ モーター) を除き、高いアキシアル方向およびラジアル方向の力を伝達できるテーパー ローラー ベアリングが標準で取り付けられています。
特定の用途では、モーターをフリーホイールする必要がある場合があります。 これは、ポート A と B をゼロ圧力に接続し、同時にポート L を通じてハウジングに 2 bar の圧力を加えることで実現できます。この状態では、ピストンがシリンダー ブロックに押し込まれ、ローラーがカムとの接触を失います。したがって、シャフトの自由な回転が可能になります。
車両が低いモーター負荷で高速で動作する必要があるモバイル用途では、モーターを低トルクおよび高速モードに切り替えることができます。 これは、油圧流体をモーターの半分のみに送り、残りの半分では流体を継続的に再循環させる統合バルブを動作させることによって実現されます。 この「縮小排気量」モードは、特定の速度に必要な流量を削減し、コストと効率が向上する可能性をもたらします。 モーターの最高速度は変わりません。
レックスロスは、移動中に減少容量へのスムーズな切り替えを可能にする特別なスプールバルブを開発しました。 これは「ソフトシフト」として知られ、2W モーターの標準機能です。 スプールバルブを「ソフトシフト」モードで動作させるには、追加のシーケンスバルブまたは電気比例制御のいずれかが必要です。