
 บ้าน
บ้าน








01





มอเตอร์ลูกสูบเรเดียล MCR Series 30, 31, 32, 33 และ 41
04
7 ม.ค. 2019
MCR คือมอเตอร์ไฮดรอลิกที่มีลูกสูบจัดเรียงตามแนวรัศมีภายในกลุ่มโรตารี่ เป็นมอเตอร์แรงบิดสูงความเร็วต่ำซึ่งทำงานตามหลักการหลายจังหวะและส่งแรงบิดโดยตรงไปยังเพลาเอาท์พุต มอเตอร์ MCR สามารถใช้ได้ทั้งในวงจรเปิดและวงจรปิด
ในวงจรเปิด น้ำมันไฮดรอลิกจะไหลจากอ่างเก็บน้ำไปยังปั๊มไฮดรอลิกจากจุดที่ถูกลำเลียงไปยังมอเตอร์ไฮดรอลิก จากมอเตอร์ไฮดรอลิก น้ำมันไฮดรอลิกจะไหลกลับไปยังอ่างเก็บน้ำโดยตรง ทิศทางการหมุนของมอเตอร์ไฮดรอลิกสามารถเปลี่ยนแปลงได้ เช่น โดยวาล์วปรับทิศทาง
ในวงจรปิด น้ำมันไฮดรอลิกจะไหลจากปั๊มไฮดรอลิกไปยังมอเตอร์ไฮดรอลิก และจากนั้นไหลกลับไปยังปั๊มไฮดรอลิกโดยตรง ทิศทางการหมุนของมอเตอร์ไฮดรอลิกเปลี่ยนไป เช่น โดยการกลับทิศทางการไหลในปั๊มไฮดรอลิก โดยทั่วไปวงจรปิดจะใช้สำหรับการส่งผ่านอุทกสถิตในการใช้งานมือถือ
04
7 ม.ค. 2019
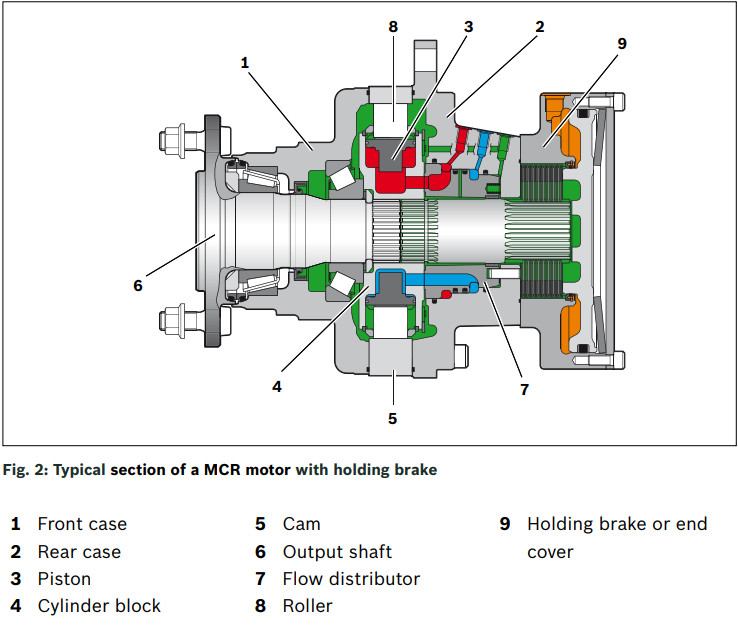
มอเตอร์ลูกสูบแนวรัศมีประกอบด้วยตัวเรือนสองส่วน (1, 2), กลุ่มหมุน (3, 4), ลูกเบี้ยว (5), เพลาเอาท์พุต (6) และตัวจ่ายการไหล (7)
มันแปลงพลังงานอุทกสถิตเป็นพลังงานกล
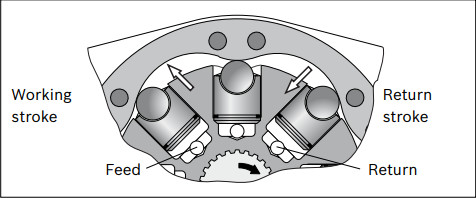
น้ำมันไฮดรอลิกจะถูกส่งตรงจากช่องทางเข้าของมอเตอร์ในเคสด้านหลัง (2) ผ่านตัวจ่ายการไหล (7) ผ่านแกลเลอรีไปยังบล็อกกระบอกสูบ (4) แรงดันเพิ่มขึ้นในกระบอกสูบซึ่งดันลูกสูบที่จัดเรียงในแนวรัศมี (3) ออกไปด้านนอก แรงในแนวรัศมีนี้กระทำผ่านลูกกลิ้ง (8) ต่อโปรไฟล์บนวงแหวนลูกเบี้ยว (5) เพื่อสร้างแรงบิดแบบหมุน แรงบิดนี้จะถูกถ่ายโอนไปยังเพลาเอาท์พุต (6) ผ่านทางร่องฟันในเสื้อสูบ (4)
หากแรงบิดเกินภาระของเพลา เสื้อสูบจะหมุน ส่งผลให้ลูกสูบเกิดจังหวะ (จังหวะการทำงาน) เมื่อถึงจุดสิ้นสุดของจังหวะ ลูกสูบจะกลับสู่รูโดยแรงปฏิกิริยาที่ลูกเบี้ยว (จังหวะย้อนกลับ) และของเหลวจะถูกป้อนไปที่ช่องทางออกของมอเตอร์ในเคสด้านหลัง
แรงบิดเอาท์พุตเกิดจากแรงที่เกิดจากแรงดันและพื้นผิวลูกสูบ มันจะเพิ่มขึ้นตามความแตกต่างของแรงดันระหว่างด้านความกดอากาศสูงและต่ำ
ความเร็วเอาต์พุตขึ้นอยู่กับการกระจัดและเป็นสัดส่วนกับการไหลเข้า จำนวนจังหวะการทำงานและจังหวะกลับสอดคล้องกับจำนวนกลีบบนลูกเบี้ยวคูณด้วยจำนวนลูกสูบ

04
7 ม.ค. 2019
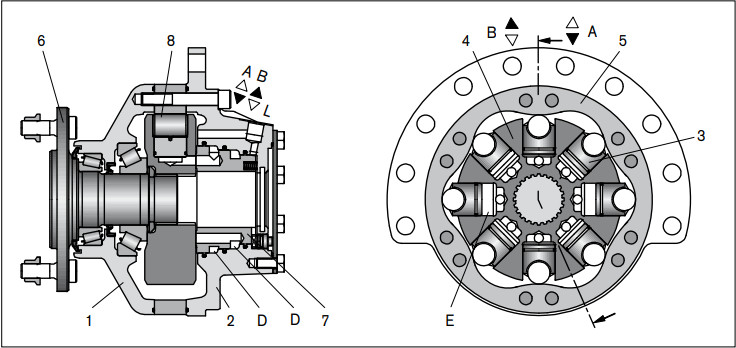
ห้องกระบอกสูบ (E) เชื่อมต่อกับพอร์ต A และ B ผ่านทางรูตามแนวแกนและทางเดินรูปวงแหวน (D)
แบริ่งลูกกลิ้งเรียวที่สามารถส่งแรงตามแนวแกนและแนวรัศมีสูงได้รับการติดตั้งเป็นมาตรฐาน ยกเว้นมอเตอร์ Hydrobase (มอเตอร์แบบครึ่งไม่มีโครงด้านหน้า)
ในการใช้งานบางอย่าง อาจมีข้อกำหนดในการหมุนมอเตอร์อย่างอิสระ ซึ่งสามารถทำได้โดยการเชื่อมต่อพอร์ต A และ B เข้ากับแรงดันศูนย์ และจ่ายแรงดัน 2 บาร์ไปที่ตัวเรือนผ่านพอร์ต L พร้อมกัน ในสภาวะนี้ ลูกสูบจะถูกบังคับให้เข้าไปในเสื้อสูบซึ่งจะบังคับให้ลูกกลิ้งสูญเสียการสัมผัสกับลูกเบี้ยว จึงทำให้สามารถหมุนเพลาได้อย่างอิสระ
ในการใช้งานแบบเคลื่อนที่ซึ่งยานพาหนะจำเป็นต้องทำงานด้วยความเร็วสูงโดยมีภาระของมอเตอร์ต่ำ สามารถเปลี่ยนมอเตอร์เป็นโหมดแรงบิดต่ำและความเร็วสูงได้ ซึ่งทำได้โดยการใช้วาล์วในตัวซึ่งส่งของไหลไฮดรอลิกไปยังมอเตอร์เพียงครึ่งหนึ่ง ในขณะที่ของเหลวหมุนเวียนซ้ำอย่างต่อเนื่องในอีกครึ่งหนึ่ง โหมด "การกระจัดที่ลดลง" นี้ช่วยลดการไหลที่จำเป็นสำหรับความเร็วที่กำหนด และให้ศักยภาพในการปรับปรุงต้นทุนและประสิทธิภาพ ความเร็วสูงสุดของมอเตอร์ยังคงไม่เปลี่ยนแปลง
Rexroth ได้พัฒนาสปูลวาล์วแบบพิเศษเพื่อให้สามารถสลับได้อย่างราบรื่นเพื่อลดการกระจัดขณะเคลื่อนที่ สิ่งนี้เรียกว่า "soft-shift" และเป็นคุณสมบัติมาตรฐานของมอเตอร์ 2W สปูลวาล์วต้องมีวาล์วลำดับเพิ่มเติมหรือการควบคุมตามสัดส่วนด้วยไฟฟ้าเพื่อให้ทำงานในโหมด "ซอฟต์ชิฟต์"